I wrote about the Xiaomi MITU robot at my Substack page [1]. This toy is built from block pieces and the finished robot stands vertically on two wheels, either in a mech warrior or dinosaur form. I was delighted with how the motor provided balance to keep the MITU standing. From a physics point of view, there must be a constant feedback for the torque motor and sensor to keep the robot vertical. I was not sure how much the algorithm took into account the motion and rotation of the earth, and noticed, whether related or not, that the MITU tended to move backwards when averaged over time.
Numerous designs for robots are out there, for example see these very impressive robots on legs [2] or wheels [3]. Now that robotic vehicles are becoming more prevalent, where, how and when are these robots useful and impactful to the larger society? The videos indicate robotic quadrupeds may be used for factory sensing and diagnostics, medical aid or package delivery. How else would you feel comfortable interacting with a robotic sentience on fours?
The robots in the online videos and the MITU take different pathways in the design of motion. One might intuit that the wheel approach ultimately provides greater velocity, while the legs offer versatility of terrain. How does or did nature choose when confronted with the question of motion? Rollypolly’s are one land animal that comes to mind with the breadth of circular and legged motion built into it’s physique, although I am not sure whether the pill bug rolls around often. Hedgehogs similarly roll into balls, exhibiting their spikes outwards for protection. Few animals on land seem to roll for long term motion.
Is there a deeper reasoning that is related with this choice? Does the increased speed from rolling make sensory decision making more difficult? Does the viscosity of natural lubricants prevent the faster speeds possible with wheel structures? Why are wheels which require axles not as commonplace in animals? In my studies of random systems and battery material ion motions, for example, one of the important governing ideas is that of diffusion of particulates or free energy. This can be described with diffusion laws, and a good starting point for discussion are the ideas known as the Fick’s laws of diffusion.
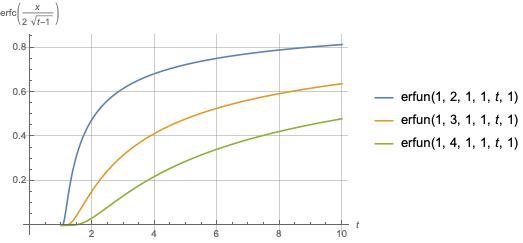
The solutions to Fick’s second laws provide a picture for the concentration of particulates. Concentration is counted from the time of first exposure to particulate and the subsequent spread or diffusion of material in space can be calculated. The shape of the functional solution provides an idea for how quickly diffusive systems adapt and respond. If taking the error function solution, assuming an exposure time of 1 second, after another second the concentration rises from 0 to 0.15, with the particulate concentration traversing 1 spacings. Assume a situation where we go exercising, raising the metabolic rate and thereby pushing the body to begin sweating. How soon do we begin sweating once there is a rise in metabolic rate? Some estimates show 0.3 grams/second (or 19 mL/min) for the perspiration rate [4]. If I understand the law of diffusion correctly, and if the law applies here, then within 1 second, our body signals to the sweat glands (all over the body or at the hottest locations?) to push out by 1 spacing about 0.3 grams of sweat. Over one to two hours, a normal human body may sweat more than 1-2 L. This is just an example of the time scales and length scales for human bodily functions.
I wonder whether to consistently run a wheel as a human body part may require a theoretical perspiration rate too fast to achieve in a modern human. The fastest marathon runner ran 1 km in about 3 minutes, or a speed around 0.005 km/s (5 km in 14 minutes 50 seconds) [5]. Five meters per second is easily achieved by a wheel, with the Koenigsegg Jesko Absolut hitting 330 mph or nearly 150 m/s [6]. Assuming velocity is linearly related to the sweat rate, the wheel offers 30 times the speed of a marathon runner, meaning upwards of 30 L may be lost in an hour. Fluid loss at that amount is probably disadvantageous for animals, to say the least.
Robots however, need not fear this problem.
References
- https://colorblue.substack.com/p/miturobot
- https://youtu.be/_uxm4iR39cc
- https://fb.watch/e3C93IK6ff/
- https://www.cdc.gov/nceh/hsb/extreme/Heat_Illness/Sweat%20Rate%20Calculation.pdf
- https://olympics.com/en/news/how-fast-marathon-run-pace-test-yourself-eliud-kipchoge-record
- https://www.topspeed.com/cars/guides/the-12-fastest-cars-in-the-world-ranked/